Main Takeaway: Distributed Quadratic Programming-Based Nonlinear Controllers for Periodic Gaits on Legged Robots Full paper : Abstract : This paper presents a novel approach to enhance
Accelerating Model Predictive Control For Legged Robots Through Distributed Optimization - Situation Notes
This practical guide collects Accelerating Model Predictive Control For Legged Robots Through Distributed Optimization through background context, nearby references, comparison cues, and reader questions so the page can feel more natural across many search queries.
In addition, this page also connects Accelerating Model Predictive Control For Legged Robots Through Distributed Optimization with for broader topic coverage.
Situation Notes
Full paper : Abstract : This paper presents a novel approach to enhance Distributed Quadratic Programming-Based Nonlinear Controllers for Periodic Gaits on Legged Robots
Information Guide
Accelerating Model Predictive Control For Legged Robots Through Distributed Optimization can be reviewed through a clear overview first, then compared with related entries and supporting context.
Guide Practical Details
Important details can vary by source, so this page groups the most readable points into a scannable format.
General Important Reminders
For changing topics, check updated sources and avoid depending on one short snippet alone.
Quick reference points
- Distributed Quadratic Programming-Based Nonlinear Controllers for Periodic Gaits on Legged Robots
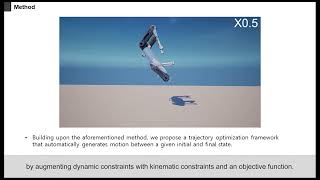
- Full paper : Abstract : This paper presents a novel approach to enhance
Why this overview helps
This page is useful when someone wants a less scattered reference for Accelerating Model Predictive Control For Legged Robots Through Distributed Optimization when the topic has many possible meanings.
Useful FAQ
Why do search results for Accelerating Model Predictive Control For Legged Robots Through Distributed Optimization vary?
Start with the main context, then compare related entries and check stronger sources when exact details matter.
What does Accelerating Model Predictive Control For Legged Robots Through Distributed Optimization usually mean?
Accelerating Model Predictive Control For Legged Robots Through Distributed Optimization usually refers to a topic that needs context, related examples, and supporting references before readers make decisions or continue searching.
Why are related topics included?
Related topics help readers compare nearby references, explore similar searches, and avoid relying on one narrow result.