Short Overview: Autonomous exploration using TurtleBot3 and ROS2 with autonome finetuning The robot is put inside an unknown environment, and the goal is to map the maze
Autonomous Frontier Exploration Turtlebot4 Ros2 Slam Demo - General Fact Check Points
This page gives readers Autonomous Frontier Exploration Turtlebot4 Ros2 Slam Demo through meaning, examples, related intent, useful checks, and follow-up paths so readers can continue into related pages with clearer context.
In addition, this page also connects Autonomous Frontier Exploration Turtlebot4 Ros2 Slam Demo with for broader topic coverage.
General Fact Check Points
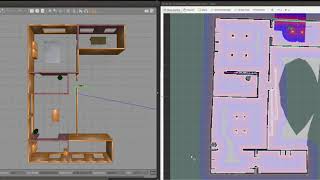
Autonomous exploration using TurtleBot3 and ROS2 with autonome finetuning The robot is put inside an unknown environment, and the goal is to map the maze UPDATE: If you're on humble or newer, please note that "params_file" has changed to "slam_params_file".
General Where It Fits
UPDATE: If you're on humble or newer, please note that "params_file" has changed to "slam_params_file". Final project for RAS 598 Mobile Robotics at Arizona State University.
General Topic Snapshot
Autonomous Frontier Exploration Turtlebot4 Ros2 Slam Demo can be reviewed through a clear overview first, then compared with related entries and supporting context.
Reference Useful Tips
Use the related entries as follow-up paths when you need more examples, current details, or alternative wording.
Relevant points collected here
- Final project for RAS 598 Mobile Robotics at Arizona State University.
- UPDATE: If you're on humble or newer, please note that "params_file" has changed to "slam_params_file".
- The robot is put inside an unknown environment, and the goal is to map the maze
- Autonomous exploration using TurtleBot3 and ROS2 with autonome finetuning
Why this overview helps
This page works best as a simple way to compare connected search results.
Questions People Also Check
Why might Autonomous Frontier Exploration Turtlebot4 Ros2 Slam Demo have several meanings?
Different pages may focus on different locations, dates, providers, versions, definitions, or user needs.
How can related pages improve understanding of Autonomous Frontier Exploration Turtlebot4 Ros2 Slam Demo?
Related pages add context, alternative wording, practical examples, and follow-up paths for deeper research.
How can readers make Autonomous Frontier Exploration Turtlebot4 Ros2 Slam Demo more specific?
Different pages may focus on different locations, dates, providers, versions, definitions, or user needs.
Why do people search for Autonomous Frontier Exploration Turtlebot4 Ros2 Slam Demo?
People often search for Autonomous Frontier Exploration Turtlebot4 Ros2 Slam Demo to understand the basics, compare related options, or find a clearer path to more specific information.