Related Context Brief: The ability to transport payloads transform Unmanned Aerial Vehicles (UAVs) from primarily monitoring and surveillance ... This video is supplementary Material to The paper; " A numerically-stable
Autonomous Quadrotor Trajectory Control - General Starter Guide
Use this page to review Autonomous Quadrotor Trajectory Control with background information, practical notes, and nearby searches in a simple and scannable format.
In addition, this page also connects Autonomous Quadrotor Trajectory Control with for broader topic coverage.
General Starter Guide
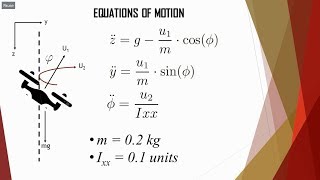
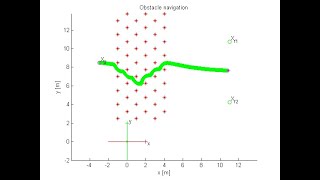
Fault-tolerant Trajectory Control of Quadrotor helicopter using GS-PID The ability to transport payloads transform Unmanned Aerial Vehicles (UAVs) from primarily monitoring and surveillance ...
General Common Details
The key details usually include definitions, examples, comparisons, requirements, limitations, and updated references.
Source Checks
Use the related entries as follow-up paths when you need more examples, current details, or alternative wording.
General Practical Context
This part keeps Autonomous Quadrotor Trajectory Control connected to practical references instead of leaving it as a single isolated phrase.
Quick reference points
- The ability to transport payloads transform Unmanned Aerial Vehicles (UAVs) from primarily monitoring and surveillance ...
- This video is supplementary Material to The paper; " A numerically-stable
- Fault-tolerant Trajectory Control of Quadrotor helicopter using GS-PID
Why this overview helps
This topic hub helps readers find practical reminders for Autonomous Quadrotor Trajectory Control before checking official or primary sources.
Useful FAQ
How can readers narrow down Autonomous Quadrotor Trajectory Control?
Readers can narrow it by adding location, year, product name, provider, price range, purpose, or the exact problem they want to solve.
How does Autonomous Quadrotor Trajectory Control connect to information?
Autonomous Quadrotor Trajectory Control can connect to information when readers need context, examples, comparisons, or practical next steps inside the same topic area.
What is the quickest way to understand Autonomous Quadrotor Trajectory Control?
Start with the main context, then compare related entries and check stronger sources when exact details matter.