Context Starter: by Ruben Grandia, Diego Pardo and Jonas Buchli Abstract: In this work we present a new formulation for ICRA 2018 Spotlight Video Interactive Session Wed PM Pod H.7 Authors: Grandia, Ruben; Pardo, Diego; Buchli, Jonas Title: ...
Contact Invariant Model Learning For Legged Robot Locomotion - Overview Follow-Up Tips
This discovery page summarizes Contact Invariant Model Learning For Legged Robot Locomotion with follow-up ideas, topic signals, and clear context with enough structure to compare nearby results.
In addition, this page also connects Contact Invariant Model Learning For Legged Robot Locomotion with for broader topic coverage.
Overview Follow-Up Tips
ICRA 2018 Spotlight Video Interactive Session Wed PM Pod H.5 Authors: Bledt, Gerardo; Wensing, Patrick; Ingersoll, Sam; Kim, ... by Ruben Grandia, Diego Pardo and Jonas Buchli Abstract: In this work we present a new formulation for
Resource Quick Guide
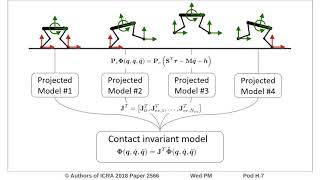
ICRA 2018 Spotlight Video Interactive Session Wed PM Pod H.7 Authors: Grandia, Ruben; Pardo, Diego; Buchli, Jonas Title: ... Paper: Whole-body optimizers have been successful at automatically computing complex ...
Useful Details for Readers
This section highlights the practical pieces readers may want before opening a more specific related page.
Use Case Context for Readers
Context matters because Contact Invariant Model Learning For Legged Robot Locomotion can connect to nearby topics, related searches, and different reader intents.
Main details to review
- by Ruben Grandia, Diego Pardo and Jonas Buchli Abstract: In this work we present a new formulation for
- Paper: Whole-body optimizers have been successful at automatically computing complex ...
- ICRA 2018 Spotlight Video Interactive Session Wed PM Pod H.7 Authors: Grandia, Ruben; Pardo, Diego; Buchli, Jonas Title: ...
- ICRA 2018 Spotlight Video Interactive Session Wed PM Pod H.5 Authors: Bledt, Gerardo; Wensing, Patrick; Ingersoll, Sam; Kim, ...
What this page helps clarify
A structured page helps by giving readers clearer context for Contact Invariant Model Learning For Legged Robot Locomotion before choosing what to open next.
Reader Questions
What is the safest way to use Contact Invariant Model Learning For Legged Robot Locomotion information?
Use it as general context first, then verify important points with official, primary, or more specific sources when accuracy matters.
How does Contact Invariant Model Learning For Legged Robot Locomotion connect to topic?
Contact Invariant Model Learning For Legged Robot Locomotion can connect to topic when readers need context, examples, comparisons, or practical next steps inside the same topic area.
How does Contact Invariant Model Learning For Legged Robot Locomotion connect to overview?
Contact Invariant Model Learning For Legged Robot Locomotion can connect to overview when readers need context, examples, comparisons, or practical next steps inside the same topic area.