Practical Context: and friends that are attending this presentation so this this is the title of the thesis is online Expert-Guided Imitation for Learning Humanoid Loco-Manipulation from Motion Capture
Control Guided Rl For Humanoid Locomotion Zachary Olkin - General Search Context
This context guide compares Control Guided Rl For Humanoid Locomotion Zachary Olkin through topic clusters, supporting snippets, intent signals, and verification reminders with enough variation for broader AGC-style topic coverage.
In addition, this page also connects Control Guided Rl For Humanoid Locomotion Zachary Olkin with for broader topic coverage.
General Search Context
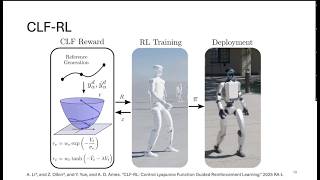
In this AI Research Roundup episode, Alex discusses the paper: 'Learning Sim-to-Real We formulate a novel Markov Decision Process for safe and data-efficient learning for
General Information Guide
Expert-Guided Imitation for Learning Humanoid Loco-Manipulation from Motion Capture and friends that are attending this presentation so this this is the title of the thesis is online This video is a part of the final project for the course EE 373/473: Deep Reinforcement Learning taught by Prof.
Topic Checklist
Important details can vary by source, so this page groups the most readable points into a scannable format.
Topic Next Steps
For changing topics, check updated sources and avoid depending on one short snippet alone.
Quick reference points
- In this AI Research Roundup episode, Alex discusses the paper: 'Learning Sim-to-Real
- and friends that are attending this presentation so this this is the title of the thesis is online
- We formulate a novel Markov Decision Process for safe and data-efficient learning for
- This video is a part of the final project for the course EE 373/473: Deep Reinforcement Learning taught by Prof.
- Expert-Guided Imitation for Learning Humanoid Loco-Manipulation from Motion Capture
Why this overview helps
The format helps reduce scattered browsing by giving a lightweight hub for scanning and continuing research.
Useful FAQ
Why do search results for Control Guided Rl For Humanoid Locomotion Zachary Olkin vary?
Start with the main context, then compare related entries and check stronger sources when exact details matter.
What does Control Guided Rl For Humanoid Locomotion Zachary Olkin usually mean?
Control Guided Rl For Humanoid Locomotion Zachary Olkin usually refers to a topic that needs context, related examples, and supporting references before readers make decisions or continue searching.
Why are related topics included?
Related topics help readers compare nearby references, explore similar searches, and avoid relying on one narrow result.