Main Topic Lens: Lecture 8 from the ETH Zürich course "Robot Learning: From Fundamentals to Foundation If you're studying IGCSE Computer Science, don't forget to subscribe and binge-watch the playlist linked below to boost your ...
Cse 478 Wi 26 Lecture6 Motion And Observation Models - Resource Specific Notes
This practical guide collects Cse 478 Wi 26 Lecture6 Motion And Observation Models through meaning, examples, related intent, useful checks, and follow-up paths without locking every page into the same repeated structure.
In addition, this page also connects Cse 478 Wi 26 Lecture6 Motion And Observation Models with for broader topic coverage.
Resource Specific Notes
If you're studying IGCSE Computer Science, don't forget to subscribe and binge-watch the playlist linked below to boost your ... Lecture 8 from the ETH Zürich course "Robot Learning: From Fundamentals to Foundation For CS498IR: AI for Robotic Manipulation Spring 2021, University of Illinois at Urbana-Champaign Instructor: Kris Hauser ...
General Reader Intent
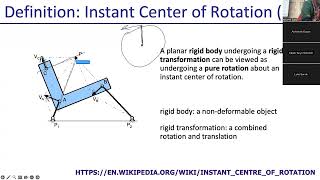
For CS498IR: AI for Robotic Manipulation Spring 2021, University of Illinois at Urbana-Champaign Instructor: Kris Hauser ...
Research Notes
Cse 478 Wi 26 Lecture6 Motion And Observation Models can be reviewed through a clear overview first, then compared with related entries and supporting context.
General Reader Checklist
Use the related entries as follow-up paths when you need more examples, current details, or alternative wording.
Relevant points collected here
- If you're studying IGCSE Computer Science, don't forget to subscribe and binge-watch the playlist linked below to boost your ...
- For CS498IR: AI for Robotic Manipulation Spring 2021, University of Illinois at Urbana-Champaign Instructor: Kris Hauser ...
- Lecture 8 from the ETH Zürich course "Robot Learning: From Fundamentals to Foundation
Why this overview helps
This page is useful when someone wants important checks for Cse 478 Wi 26 Lecture6 Motion And Observation Models while keeping the topic easy to scan.
Questions People Also Check
How does Cse 478 Wi 26 Lecture6 Motion And Observation Models connect to context?
Cse 478 Wi 26 Lecture6 Motion And Observation Models can connect to context when readers need context, examples, comparisons, or practical next steps inside the same topic area.
What makes Cse 478 Wi 26 Lecture6 Motion And Observation Models worth comparing?
Comparison helps readers avoid narrow results and find the angle that best matches their intent.
What details can change around Cse 478 Wi 26 Lecture6 Motion And Observation Models?
Dates, prices, policies, availability, providers, software versions, and public details may change over time.
What supporting details help explain Cse 478 Wi 26 Lecture6 Motion And Observation Models?
Comparison helps readers avoid narrow results and find the angle that best matches their intent.