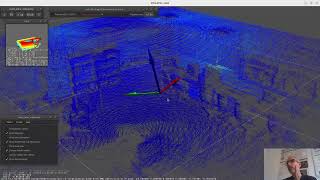
Reader Notes: Hands-on step by step tutorial covering Ouster LiDAR ROS2 driver installation and configuration, running LIO, map edit, and ... Presented at the 2023 IEEE International Conference on Robotics and Automation (ICRA) in London, UK Title:
Direct Lidar Inertial Odometry Lightweight Lio With Continuous Time Motion Correction - Resource Quick Overview
This browsing page explains Direct Lidar Inertial Odometry Lightweight Lio With Continuous Time Motion Correction through quick context, useful references, alternate wording, and broader search ideas with enough variation for broader AGC-style topic coverage.
In addition, this page also connects Direct Lidar Inertial Odometry Lightweight Lio With Continuous Time Motion Correction with for broader topic coverage.
Resource Quick Overview
Presented at the 2023 IEEE International Conference on Robotics and Automation (ICRA) in London, UK Title: Hands-on step by step tutorial covering Ouster LiDAR ROS2 driver installation and configuration, running LIO, map edit, and ...
Topic Common Checks
For changing topics, check updated sources and avoid depending on one short snippet alone.
Topic Where It Fits
Context matters because Direct Lidar Inertial Odometry Lightweight Lio With Continuous Time Motion Correction can connect to nearby topics, related searches, and different reader intents.
Practical Points for Readers
Important details can vary by source, so this page groups the most readable points into a scannable format.
Key points worth scanning
- Hands-on step by step tutorial covering Ouster LiDAR ROS2 driver installation and configuration, running LIO, map edit, and ...
- Presented at the 2023 IEEE International Conference on Robotics and Automation (ICRA) in London, UK Title:
How readers can use this page
This page is useful when someone wants practical reminders for Direct Lidar Inertial Odometry Lightweight Lio With Continuous Time Motion Correction so they can continue with better search intent.
Helpful Questions
What makes Direct Lidar Inertial Odometry Lightweight Lio With Continuous Time Motion Correction easier to understand?
Clear headings, short explanations, practical notes, and related entries make Direct Lidar Inertial Odometry Lightweight Lio With Continuous Time Motion Correction easier to scan and compare.
Why can Direct Lidar Inertial Odometry Lightweight Lio With Continuous Time Motion Correction have different answers?
Different sources may focus on different regions, dates, providers, versions, policies, or user situations.
How does Direct Lidar Inertial Odometry Lightweight Lio With Continuous Time Motion Correction connect to reference?
Direct Lidar Inertial Odometry Lightweight Lio With Continuous Time Motion Correction can connect to reference when readers need context, examples, comparisons, or practical next steps inside the same topic area.