Search Snapshot: UPDATE: If you're on humble or newer, please note that "params_file" has changed to "slam_params_file". Completed for my Bachelor's degree project in robotics at Heriot-Watt University, Scotland.
E Puck Ros Slam - General Follow-Up Tips
This reader-first page connects E Puck Ros Slam through important details, surrounding topics, common questions, and scan-friendly sections with enough variation for broader AGC-style topic coverage.
In addition, this page also connects E Puck Ros Slam with for broader topic coverage.
General Follow-Up Tips
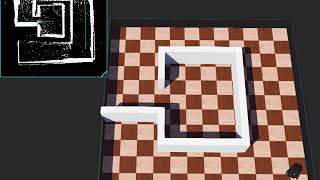
Here we implemented Monte Carlo Localization (MCL or Particle Filter Localization), an algorithm for estimation of robot's position ... The video shows a simulation performed with the Virtual Robot Experimentation Platform (V-REP: ...
Overview Snapshot
UPDATE: If you're on humble or newer, please note that "params_file" has changed to "slam_params_file". Completed for my Bachelor's degree project in robotics at Heriot-Watt University, Scotland.
Resource Main Points
This section highlights the practical pieces readers may want before opening a more specific related page.
Reference Decision Context
Context matters because E Puck Ros Slam can connect to nearby topics, related searches, and different reader intents.
Main details to review
- The video shows a simulation performed with the Virtual Robot Experimentation Platform (V-REP: ...
- Here we implemented Monte Carlo Localization (MCL or Particle Filter Localization), an algorithm for estimation of robot's position ...
- Completed for my Bachelor's degree project in robotics at Heriot-Watt University, Scotland.
- UPDATE: If you're on humble or newer, please note that "params_file" has changed to "slam_params_file".
What this page helps clarify
This reference can help when someone wants a lightweight hub for scanning and continuing research.
Reader Questions
How does E Puck Ros Slam connect to overview?
E Puck Ros Slam can connect to overview when readers need context, examples, comparisons, or practical next steps inside the same topic area.
How can readers check E Puck Ros Slam more carefully?
Check freshness, source quality, related examples, and any requirements or limitations before relying on one answer.
How should beginners approach E Puck Ros Slam?
Beginners should scan the overview first, then use related terms to narrow the subject into a more specific question.




![ROS topics description | Webots ROS Simulator | [Tutorial 2]](https://i.ytimg.com/vi/mWdyeYOUULs/mqdefault.jpg)




