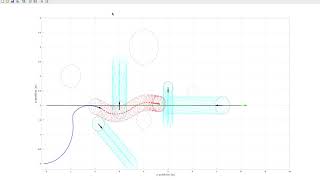
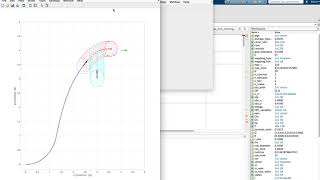
Context Briefing: Point stabilisation Model Predictive Control with one moving obstacle. Trajectory tracking Model Predictive Control with multiple moving and static obstacle.
Mpc Local Planner Simulation On Wheelchair Casadi - Reference Reference Guide
This search page groups Mpc Local Planner Simulation On Wheelchair Casadi through important details, surrounding topics, common questions, and scan-friendly sections to support more niches without sounding like one fixed template.
In addition, this page also connects Mpc Local Planner Simulation On Wheelchair Casadi with for broader topic coverage.
Reference Reference Guide
Trajectory tracking Model Predictive Control with multiple moving and static obstacle. Point stabilisation Model Predictive Control with one moving obstacle.
Information Core Points
The key details usually include definitions, examples, comparisons, requirements, limitations, and updated references.
Useful Reminders
Use the related entries as follow-up paths when you need more examples, current details, or alternative wording.
Decision Context for Readers
This part keeps Mpc Local Planner Simulation On Wheelchair Casadi connected to practical references instead of leaving it as a single isolated phrase.
Quick reference points
- Point stabilisation Model Predictive Control with one moving obstacle.
- Trajectory tracking Model Predictive Control with multiple moving and static obstacle.
Why this topic is useful
This reference can help when someone wants a fast starting point without relying on one short snippet.
Useful FAQ
What makes Mpc Local Planner Simulation On Wheelchair Casadi easier to understand?
Clear headings, short explanations, practical notes, and related entries make Mpc Local Planner Simulation On Wheelchair Casadi easier to scan and compare.
Why can Mpc Local Planner Simulation On Wheelchair Casadi have different answers?
Different sources may focus on different regions, dates, providers, versions, policies, or user situations.
How does Mpc Local Planner Simulation On Wheelchair Casadi connect to reference?
Mpc Local Planner Simulation On Wheelchair Casadi can connect to reference when readers need context, examples, comparisons, or practical next steps inside the same topic area.