Fast Context: This video shows the results of a NMPC strategy for a quadrotor UAV designed to realize the landing of the quadrotor on a
Nonlinear Model Predictive Control Of Unmanned Surface Vehicle Moving Obstacle - Context Practical Context
This topic page brings together Nonlinear Model Predictive Control Of Unmanned Surface Vehicle Moving Obstacle through topic clusters, supporting snippets, intent signals, and verification reminders so readers can continue into related pages with clearer context.
In addition, this page also connects Nonlinear Model Predictive Control Of Unmanned Surface Vehicle Moving Obstacle with for broader topic coverage.
Context Practical Context
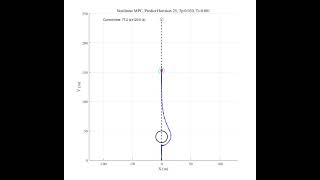
This video shows the results of a NMPC strategy for a quadrotor UAV designed to realize the landing of the quadrotor on a
Context Useful Reminders
Use the related entries as follow-up paths when you need more examples, current details, or alternative wording.
Context Topic Overview
This section introduces Nonlinear Model Predictive Control Of Unmanned Surface Vehicle Moving Obstacle with the most useful background points and a simple path into the rest of the page.
Context Helpful Details
The key details usually include definitions, examples, comparisons, requirements, limitations, and updated references.
Important details found
- This video shows the results of a NMPC strategy for a quadrotor UAV designed to realize the landing of the quadrotor on a
Why this topic is useful
A structured page helps readers move from better wording, relevant follow-ups, and useful checks.
Common Questions
Can details about Nonlinear Model Predictive Control Of Unmanned Surface Vehicle Moving Obstacle change?
Yes. Some details may change depending on providers, policies, dates, locations, product updates, or official announcements.
How can this page help with research?
It groups related context and search paths so readers can move from a broad idea into more focused follow-up pages.
What related areas connect to Nonlinear Model Predictive Control Of Unmanned Surface Vehicle Moving Obstacle?
Related areas may include comparisons, examples, requirements, common mistakes, updated references, and practical follow-up guides.
How does Nonlinear Model Predictive Control Of Unmanned Surface Vehicle Moving Obstacle connect to guide?
Nonlinear Model Predictive Control Of Unmanned Surface Vehicle Moving Obstacle can connect to guide when readers need context, examples, comparisons, or practical next steps inside the same topic area.