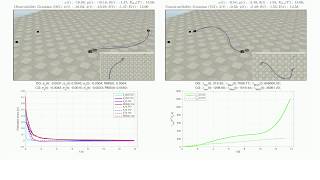
Fast Notes: Random length motions with jerk/acc/vel constraints are executed in 4ms cycle time. When user moves blue ball by mouse on screen, robot generates smooth and time optimal
Online Trajectory Generation Experiment - Information Important Details
This practical guide collects Online Trajectory Generation Experiment through key notes, similar searches, practical details, and next-step resources so readers can continue into related pages with clearer context.
In addition, this page also connects Online Trajectory Generation Experiment with for broader topic coverage.
Information Important Details
Random length motions with jerk/acc/vel constraints are executed in 4ms cycle time. When user moves blue ball by mouse on screen, robot generates smooth and time optimal Safe handling of dynamic highway and inner city scenarios with autonomous vehicles involves the problem of
Topic Important Context
This part keeps Online Trajectory Generation Experiment connected to practical references instead of leaving it as a single isolated phrase.
Guide Topic Overview
Online Trajectory Generation Experiment can be reviewed through a clear overview first, then compared with related entries and supporting context.
Reference Review Notes
Use the related entries as follow-up paths when you need more examples, current details, or alternative wording.
Relevant points collected here
- Safe handling of dynamic highway and inner city scenarios with autonomous vehicles involves the problem of
- Random length motions with jerk/acc/vel constraints are executed in 4ms cycle time.
- When user moves blue ball by mouse on screen, robot generates smooth and time optimal
How this reference can help
Readers often search for Online Trajectory Generation Experiment because they want a simple way to compare connected search results.
Questions People Also Check
How does Online Trajectory Generation Experiment connect to topic?
Online Trajectory Generation Experiment can connect to topic when readers need context, examples, comparisons, or practical next steps inside the same topic area.
How does Online Trajectory Generation Experiment connect to overview?
Online Trajectory Generation Experiment can connect to overview when readers need context, examples, comparisons, or practical next steps inside the same topic area.
How can readers check Online Trajectory Generation Experiment more carefully?
Check freshness, source quality, related examples, and any requirements or limitations before relying on one answer.
How should beginners approach Online Trajectory Generation Experiment?
Beginners should scan the overview first, then use related terms to narrow the subject into a more specific question.