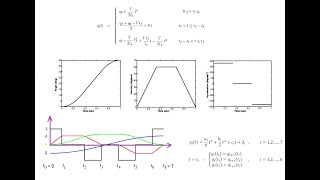
Helpful Brief: Trajectory Planning for a Single Axis Using Quintic Polynomials, 13/12/2015 Circular and Linear movement using Quintic Polynomial Trajectory Planning ‐ PAROL6 ROBOT
Pythonrobotics Motion Planning With Quintic Polynomials - Overview Main Overview
This practical guide collects Pythonrobotics Motion Planning With Quintic Polynomials through background context, nearby references, comparison cues, and reader questions so readers can continue into related pages with clearer context.
In addition, this page also connects Pythonrobotics Motion Planning With Quintic Polynomials with for broader topic coverage.
Overview Main Overview
Circular and Linear movement using Quintic Polynomial Trajectory Planning ‐ PAROL6 ROBOT Different methods of generating parametric trajectories (joint variables as a function of time) for path Trajectory Planning for a Single Axis Using Quintic Polynomials, 13/12/2015
Overview Important Notes
This section highlights the practical pieces readers may want before opening a more specific related page.
Resource Why It Matters
Context matters because Pythonrobotics Motion Planning With Quintic Polynomials can connect to nearby topics, related searches, and different reader intents.
Reader Tips
Use the related entries as follow-up paths when you need more examples, current details, or alternative wording.
Relevant points collected here
- Trajectory Planning for a Single Axis Using Quintic Polynomials, 13/12/2015
- Circular and Linear movement using Quintic Polynomial Trajectory Planning ‐ PAROL6 ROBOT
- Different methods of generating parametric trajectories (joint variables as a function of time) for path
What this page helps clarify
The format helps reduce scattered browsing by giving a broad question into more specific references.
Questions People Also Check
How does Pythonrobotics Motion Planning With Quintic Polynomials connect to information?
Pythonrobotics Motion Planning With Quintic Polynomials can connect to information when readers need context, examples, comparisons, or practical next steps inside the same topic area.
What is the quickest way to understand Pythonrobotics Motion Planning With Quintic Polynomials?
Start with the main context, then compare related entries and check stronger sources when exact details matter.
When should Pythonrobotics Motion Planning With Quintic Polynomials be verified from official sources?
Official or primary sources are best when the information can affect decisions, costs, eligibility, safety, or deadlines.
Why do search results for Pythonrobotics Motion Planning With Quintic Polynomials vary?
Start with the main context, then compare related entries and check stronger sources when exact details matter.
![[PythonRobotics] Motion planning with quintic polynomials.](https://i.ytimg.com/vi/sbpM1Shg6u8/mqdefault.jpg)