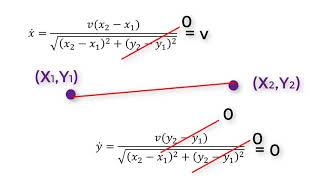
Topic Compass: In this video, we write PSoC code to get our SCARA manipulator to move the end-effector in a straight line at a constant velocity.
Robotics 2 U1 Kinematics S4 Path Planning P1 Using The Jacobian - Research Tips
This page organizes Robotics 2 U1 Kinematics S4 Path Planning P1 Using The Jacobian with search intent, readable summaries, and connected topic ideas so the subject feels less scattered.
In addition, this page also connects Robotics 2 U1 Kinematics S4 Path Planning P1 Using The Jacobian with for broader topic coverage.
Research Tips
In this video, we write PSoC code to get our SCARA manipulator to move the end-effector in a straight line at a constant velocity.
Resource Search Overview
A clean overview helps readers understand Robotics 2 U1 Kinematics S4 Path Planning P1 Using The Jacobian before moving into details, examples, or connected topics.
Important Details
This section highlights the practical pieces readers may want before opening a more specific related page.
General Freshness Notes
Context matters because Robotics 2 U1 Kinematics S4 Path Planning P1 Using The Jacobian can connect to nearby topics, related searches, and different reader intents.
Main details to review
- In this video, we write PSoC code to get our SCARA manipulator to move the end-effector in a straight line at a constant velocity.
How readers can use this page
Readers can use this page to get a lightweight hub for scanning and continuing research.
Reader Questions
How can readers narrow down Robotics 2 U1 Kinematics S4 Path Planning P1 Using The Jacobian?
Readers can narrow it by adding location, year, product name, provider, price range, purpose, or the exact problem they want to solve.
How does Robotics 2 U1 Kinematics S4 Path Planning P1 Using The Jacobian connect to information?
Robotics 2 U1 Kinematics S4 Path Planning P1 Using The Jacobian can connect to information when readers need context, examples, comparisons, or practical next steps inside the same topic area.
What is the quickest way to understand Robotics 2 U1 Kinematics S4 Path Planning P1 Using The Jacobian?
Start with the main context, then compare related entries and check stronger sources when exact details matter.