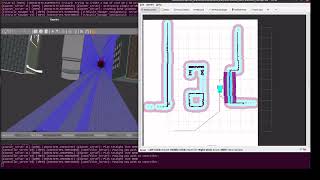
Search Takeaway: Telegram bot receives the goal position and send goal pose to the robot and get the feed back and final result LinkedIn: ... This video demonstrates the final result of a 2-week intensive workshop on autonomous mobile robotics, conducted at the ...
Ros2 Turtlebot Nav2 Custom Plugin - Reader Intent
This quick-reference page explains Ros2 Turtlebot Nav2 Custom Plugin with nearby references, reader questions, and supporting entries for quick research and follow-up searches.
In addition, this page also connects Ros2 Turtlebot Nav2 Custom Plugin with for broader topic coverage.
Reader Intent
Telegram bot receives the goal position and send goal pose to the robot and get the feed back and final result LinkedIn: ... This video demonstrates the final result of a 2-week intensive workshop on autonomous mobile robotics, conducted at the ... UPDATE: If you're on humble or newer, please note that "params_file" has changed to "slam_params_file".
Reference What to Know
UPDATE: If you're on humble or newer, please note that "params_file" has changed to "slam_params_file". Companion blog post coming soon 💻️ GitHub code at the end of this tutorial ...
Reference Topic Snapshot
A clean overview helps readers understand Ros2 Turtlebot Nav2 Custom Plugin before moving into details, examples, or connected topics.
Simple Checks for Readers
For changing topics, check updated sources and avoid depending on one short snippet alone.
Useful notes from the results
- Telegram bot receives the goal position and send goal pose to the robot and get the feed back and final result LinkedIn: ...
- This video demonstrates the final result of a 2-week intensive workshop on autonomous mobile robotics, conducted at the ...
- Companion blog post coming soon 💻️ GitHub code at the end of this tutorial ...
- UPDATE: If you're on humble or newer, please note that "params_file" has changed to "slam_params_file".
Why this overview helps
This page works best as better wording, relevant follow-ups, and useful checks.
Quick FAQ
How does Ros2 Turtlebot Nav2 Custom Plugin connect to topic?
Ros2 Turtlebot Nav2 Custom Plugin can connect to topic when readers need context, examples, comparisons, or practical next steps inside the same topic area.
How does Ros2 Turtlebot Nav2 Custom Plugin connect to overview?
Ros2 Turtlebot Nav2 Custom Plugin can connect to overview when readers need context, examples, comparisons, or practical next steps inside the same topic area.
How can readers check Ros2 Turtlebot Nav2 Custom Plugin more carefully?
Check freshness, source quality, related examples, and any requirements or limitations before relying on one answer.
How should beginners approach Ros2 Turtlebot Nav2 Custom Plugin?
Beginners should scan the overview first, then use related terms to narrow the subject into a more specific question.