Topic Brief: Obin Kwon, Dongki Jung, Youngji Kim, Soohyun Ryu, Suyong Yeon, Songhwai Oh, and Donghwan Lee, "WayIL: Image-based ... Autonomous Delivery Robot Demonstration Using NDT matching and LiDAR Odometry in APT
Scalable And Robust Robot Localisation Using Ndt Map Representation - General Fact Check Points
This reference brings together Scalable And Robust Robot Localisation Using Ndt Map Representation with main details, supporting notes, and connected entries for readers who want a clearer starting point.
In addition, this page also connects Scalable And Robust Robot Localisation Using Ndt Map Representation with for broader topic coverage.
General Fact Check Points
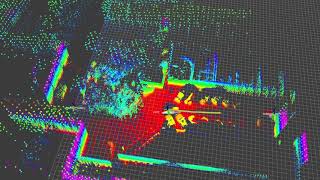
Autonomous Delivery Robot Demonstration Using NDT matching and LiDAR Odometry in APT Obin Kwon, Dongki Jung, Youngji Kim, Soohyun Ryu, Suyong Yeon, Songhwai Oh, and Donghwan Lee, "WayIL: Image-based ...
Topic Important Context
This part keeps Scalable And Robust Robot Localisation Using Ndt Map Representation connected to practical references instead of leaving it as a single isolated phrase.
General Topic Snapshot
Scalable And Robust Robot Localisation Using Ndt Map Representation can be reviewed through a clear overview first, then compared with related entries and supporting context.
Reference Review Notes
Use the related entries as follow-up paths when you need more examples, current details, or alternative wording.
Relevant points collected here
- Obin Kwon, Dongki Jung, Youngji Kim, Soohyun Ryu, Suyong Yeon, Songhwai Oh, and Donghwan Lee, "WayIL: Image-based ...
- Autonomous Delivery Robot Demonstration Using NDT matching and LiDAR Odometry in APT
How this reference can help
This reference can help when someone wants a quick explanation, related examples, and practical next steps.
Questions People Also Check
How does Scalable And Robust Robot Localisation Using Ndt Map Representation connect to information?
Scalable And Robust Robot Localisation Using Ndt Map Representation can connect to information when readers need context, examples, comparisons, or practical next steps inside the same topic area.
What is the quickest way to understand Scalable And Robust Robot Localisation Using Ndt Map Representation?
Start with the main context, then compare related entries and check stronger sources when exact details matter.
When should Scalable And Robust Robot Localisation Using Ndt Map Representation be verified from official sources?
Official or primary sources are best when the information can affect decisions, costs, eligibility, safety, or deadlines.
Why do search results for Scalable And Robust Robot Localisation Using Ndt Map Representation vary?
Start with the main context, then compare related entries and check stronger sources when exact details matter.