At a Glance: Companion blog post coming soon 💻️ GitHub code at the end of this tutorial ... UPDATE: If you're on humble or newer, please note that "params_file" has changed to "slam_params_file".
Slam Using The Ros 2 Navigation Stack Nav2 - Context Decision Guide
This search guide collects Slam Using The Ros 2 Navigation Stack Nav2 with useful examples, follow-up ideas, and topic signals before checking stronger or official sources.
In addition, this page also connects Slam Using The Ros 2 Navigation Stack Nav2 with for broader topic coverage.
Context Decision Guide
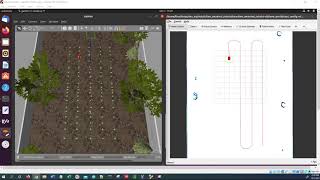
I built a robot in simulation that uses LIDAR scans to map an unknown environment. UPDATE: If you're on humble or newer, please note that "params_file" has changed to "slam_params_file".
Overview What to Check First
For changing topics, check updated sources and avoid depending on one short snippet alone.
Overview What It Connects To
Context matters because Slam Using The Ros 2 Navigation Stack Nav2 can connect to nearby topics, related searches, and different reader intents.
Resource Details That Matter
Important details can vary by source, so this page groups the most readable points into a scannable format.
Key points worth scanning
- Companion blog post coming soon 💻️ GitHub code at the end of this tutorial ...
- I built a robot in simulation that uses LIDAR scans to map an unknown environment.
- UPDATE: If you're on humble or newer, please note that "params_file" has changed to "slam_params_file".
Why this overview helps
Readers use this page when they need clearer context for Slam Using The Ros 2 Navigation Stack Nav2 without relying on one result only.
Helpful Questions
What should be checked first?
Readers should check the main context, important requirements, source freshness, and any details that may change over time.
What should readers do next?
Readers can review the linked topics, compare several sources, and verify important details before acting on the information.
How can readers narrow down Slam Using The Ros 2 Navigation Stack Nav2?
Readers can narrow it by adding location, year, product name, provider, price range, purpose, or the exact problem they want to solve.

![ROS2 Nav2 - Navigation Stack in 1 Hour [Crash Course]](https://i.ytimg.com/vi/idQb2pB-h2Q/mqdefault.jpg)