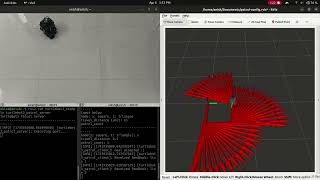
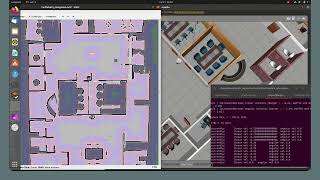
Main Points: Using Python/ROS to autonomously avoid obstacles, search for targets using computer vision, and bring them to a goal location.
Turtlebot3 Patrol - Overview Summary
This page gives readers Turtlebot3 Patrol through quick context, useful references, alternate wording, and broader search ideas so the page can feel more natural across many search queries.
In addition, this page also connects Turtlebot3 Patrol with for broader topic coverage.
Overview Summary
Using Python/ROS to autonomously avoid obstacles, search for targets using computer vision, and bring them to a goal location.
Information Decision Context
The surrounding context helps explain why people search for Turtlebot3 Patrol and what they usually want to check next.
Resource Helpful Details
This section highlights the practical pieces readers may want before opening a more specific related page.
Guide What to Compare
Before relying on any single result, compare related pages and verify important facts from stronger sources.
Main details to review
- Using Python/ROS to autonomously avoid obstacles, search for targets using computer vision, and bring them to a goal location.
Why this topic is useful
Readers use this page when they need a less scattered reference for Turtlebot3 Patrol so they can continue with better search intent.
Reader Questions
How does Turtlebot3 Patrol connect to overview?
Turtlebot3 Patrol can connect to overview when readers need context, examples, comparisons, or practical next steps inside the same topic area.
How can readers check Turtlebot3 Patrol more carefully?
Check freshness, source quality, related examples, and any requirements or limitations before relying on one answer.
How should beginners approach Turtlebot3 Patrol?
Beginners should scan the overview first, then use related terms to narrow the subject into a more specific question.