Context Summary: This movie shows how Energid's Actin software can be used for complex, real-time path planning--allowing Real-time path planning is crucial to the dexterity of UAVs when traversing through
A Deliberative Obstacle Avoidance For Aerial Robots In Dynamic Environments - General Common Use Cases
This reader-first page connects A Deliberative Obstacle Avoidance For Aerial Robots In Dynamic Environments through topic clusters, supporting snippets, intent signals, and verification reminders so readers can continue into related pages with clearer context.
In addition, this page also connects A Deliberative Obstacle Avoidance For Aerial Robots In Dynamic Environments with for broader topic coverage.
General Common Use Cases
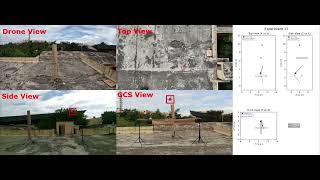
This work presents an Economic Model Predictive Control (EMPC) framework to ... Real-time path planning is crucial to the dexterity of UAVs when traversing through This movie shows how Energid's Actin software can be used for complex, real-time path planning--allowing
General Next Search Paths
Use the related entries as follow-up paths when you need more examples, current details, or alternative wording.
Reference Search Overview
This section introduces A Deliberative Obstacle Avoidance For Aerial Robots In Dynamic Environments with the most useful background points and a simple path into the rest of the page.
Information Key Details
The key details usually include definitions, examples, comparisons, requirements, limitations, and updated references.
Important details found
- This movie shows how Energid's Actin software can be used for complex, real-time path planning--allowing
- Real-time path planning is crucial to the dexterity of UAVs when traversing through
- This work presents an Economic Model Predictive Control (EMPC) framework to ...
How readers can use this page
This reference can help when someone wants better wording, relevant follow-ups, and useful checks.
Common Questions
What is the best next step after reading about A Deliberative Obstacle Avoidance For Aerial Robots In Dynamic Environments?
The best next step is to open related entries, compare several references, and verify any important detail before acting.
How does A Deliberative Obstacle Avoidance For Aerial Robots In Dynamic Environments connect to similar topics?
Avoid treating one short snippet as complete, especially when the topic involves money, health, law, schedules, or current details.
Can details about A Deliberative Obstacle Avoidance For Aerial Robots In Dynamic Environments change?
Yes. Some details may change depending on providers, policies, dates, locations, product updates, or official announcements.
How can this page help with research?
It groups related context and search paths so readers can move from a broad idea into more focused follow-up pages.