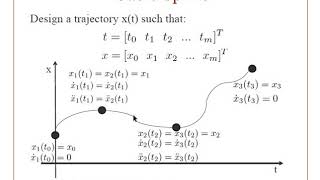
Quick Summary: This video explains how we can define boundary conditions for multiple intermediate positions ( The translated content of this course is available in regional languages.
Lecture 3 6 Waypoint Trajectory Generation Robotics - Resource Related Context
This practical guide collects Lecture 3 6 Waypoint Trajectory Generation Robotics through meaning, examples, related intent, useful checks, and follow-up paths to support more niches without sounding like one fixed template.
In addition, this page also connects Lecture 3 6 Waypoint Trajectory Generation Robotics with for broader topic coverage.
Resource Related Context
The translated content of this course is available in regional languages. This video explains how we can define boundary conditions for multiple intermediate positions (
Information Information Guide
Sebastian Castro discusses technical concepts, practical tips, and software examples for motion This is my work with my colleague on using neural networks to learn minimum snap optimization for
Guide Checklist
Important details can vary by source, so this page groups the most readable points into a scannable format.
Verification Tips for Readers
For changing topics, check updated sources and avoid depending on one short snippet alone.
Quick reference points
- Sebastian Castro discusses technical concepts, practical tips, and software examples for motion
- This is my work with my colleague on using neural networks to learn minimum snap optimization for
- This video explains how we can define boundary conditions for multiple intermediate positions (
- The translated content of this course is available in regional languages.
How readers can use this page
Readers use this page when they need practical reminders for Lecture 3 6 Waypoint Trajectory Generation Robotics without relying on one result only.
Useful FAQ
How can readers narrow down Lecture 3 6 Waypoint Trajectory Generation Robotics?
Readers can narrow it by adding location, year, product name, provider, price range, purpose, or the exact problem they want to solve.
How does Lecture 3 6 Waypoint Trajectory Generation Robotics connect to information?
Lecture 3 6 Waypoint Trajectory Generation Robotics can connect to information when readers need context, examples, comparisons, or practical next steps inside the same topic area.
What is the quickest way to understand Lecture 3 6 Waypoint Trajectory Generation Robotics?
Start with the main context, then compare related entries and check stronger sources when exact details matter.