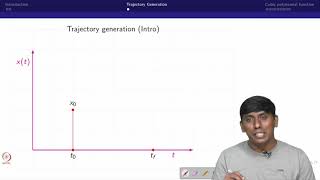
Main Takeaway: Different methods of generating parametric trajectories (joint variables as a function of time) for The translated content of this course is available in regional languages.
Trajectory Generation Robotics Mathematical Introduction To Robotics - Context Overview
This page organizes Trajectory Generation Robotics Mathematical Introduction To Robotics with background information, practical notes, and nearby searches before opening more specific references.
In addition, this page also connects Trajectory Generation Robotics Mathematical Introduction To Robotics with for broader topic coverage.
Context Overview
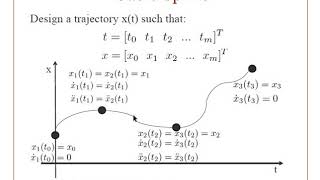
The translated content of this course is available in regional languages. This video explains how we can define boundary conditions for multiple intermediate positions (waypoints) in order to generate a ...
Reference Planning Tips
For changing topics, check updated sources and avoid depending on one short snippet alone.
Information Search Context
Context matters because Trajectory Generation Robotics Mathematical Introduction To Robotics can connect to nearby topics, related searches, and different reader intents.
Overview Common Factors
Important details can vary by source, so this page groups the most readable points into a scannable format.
Key points worth scanning
- The translated content of this course is available in regional languages.
- This video explains how we can define boundary conditions for multiple intermediate positions (waypoints) in order to generate a ...
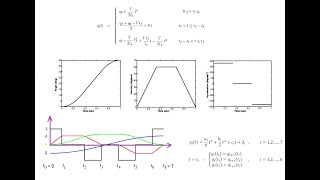
- Different methods of generating parametric trajectories (joint variables as a function of time) for
Why this topic is useful
A structured page helps readers move from clear context before opening more detailed pages.
Helpful Questions
What should be checked first?
Readers should check the main context, important requirements, source freshness, and any details that may change over time.
What should readers do next?
Readers can review the linked topics, compare several sources, and verify important details before acting on the information.
How can readers narrow down Trajectory Generation Robotics Mathematical Introduction To Robotics?
Readers can narrow it by adding location, year, product name, provider, price range, purpose, or the exact problem they want to solve.