Research Brief: Ever wanted to build a drone that can find and land on a visual target all on its own? The system integrates perception and offboard control to guide the vehicle towards a visual target.
Precision Landing With Px4 And Ros 2 Using Aruco Markers - Relevant Notes for Readers
This search page groups Precision Landing With Px4 And Ros 2 Using Aruco Markers through important details, surrounding topics, common questions, and scan-friendly sections while keeping the content simple to scan and easy to expand.
In addition, this page also connects Precision Landing With Px4 And Ros 2 Using Aruco Markers with for broader topic coverage.
Relevant Notes for Readers
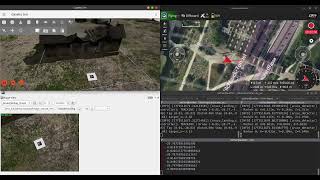
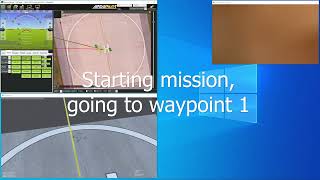
Ever wanted to build a drone that can find and land on a visual target all on its own? The system integrates perception and offboard control to guide the vehicle towards a visual target. What if a drone could see where to land instead of relying only on GPS?
General Browse Summary
What if a drone could see where to land instead of relying only on GPS? Test Flight carried out in exterior due to GPS requirement for positioning.
Context Reference Context
This part keeps Precision Landing With Px4 And Ros 2 Using Aruco Markers connected to practical references instead of leaving it as a single isolated phrase.
Overview Useful Tips
Before relying on any single result, compare related pages and verify important facts from stronger sources.
Important details found
- Ever wanted to build a drone that can find and land on a visual target all on its own?
- The system integrates perception and offboard control to guide the vehicle towards a visual target.
- Test Flight carried out in exterior due to GPS requirement for positioning.
- What if a drone could see where to land instead of relying only on GPS?
Why this overview helps
This page works best as a quick explanation, related examples, and practical next steps.
Common Questions
What is the best next step after reading about Precision Landing With Px4 And Ros 2 Using Aruco Markers?
The best next step is to open related entries, compare several references, and verify any important detail before acting.
How does Precision Landing With Px4 And Ros 2 Using Aruco Markers connect to similar topics?
Avoid treating one short snippet as complete, especially when the topic involves money, health, law, schedules, or current details.
Can details about Precision Landing With Px4 And Ros 2 Using Aruco Markers change?
Yes. Some details may change depending on providers, policies, dates, locations, product updates, or official announcements.
How can this page help with research?
It groups related context and search paths so readers can move from a broad idea into more focused follow-up pages.