Fast Context: Ever wanted to build a drone that can find and land on a visual target all on its own? The system integrates perception and offboard control to guide the vehicle towards a visual target.
Simulation Of Marker Based Precision Landing Using Ros 2 Px4 Sitl And Gazebo - General Background Context
This page organizes Simulation Of Marker Based Precision Landing Using Ros 2 Px4 Sitl And Gazebo with background information, practical notes, and nearby searches with enough structure to compare related entries.
In addition, this page also connects Simulation Of Marker Based Precision Landing Using Ros 2 Px4 Sitl And Gazebo with for broader topic coverage.
General Background Context
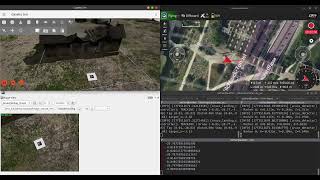
Ever wanted to build a drone that can find and land on a visual target all on its own? The system integrates perception and offboard control to guide the vehicle towards a visual target. What if a drone could see where to land instead of relying only on GPS?
Topic Main Points
The key details usually include definitions, examples, comparisons, requirements, limitations, and updated references.
Topic Guide
A clean overview helps readers understand Simulation Of Marker Based Precision Landing Using Ros 2 Px4 Sitl And Gazebo before moving into details, examples, or connected topics.
Decision Tips for Readers
For changing topics, check updated sources and avoid depending on one short snippet alone.
Useful notes from the results
- The system integrates perception and offboard control to guide the vehicle towards a visual target.
- What if a drone could see where to land instead of relying only on GPS?
- Ever wanted to build a drone that can find and land on a visual target all on its own?
How readers can use this page
This page is useful when someone wants a broader view for Simulation Of Marker Based Precision Landing Using Ros 2 Px4 Sitl And Gazebo before checking official or primary sources.
Quick FAQ
Is this page a final source?
No. It is best used as a quick reference and discovery page before checking stronger or official sources.
What is the safest way to use Simulation Of Marker Based Precision Landing Using Ros 2 Px4 Sitl And Gazebo information?
Use it as general context first, then verify important points with official, primary, or more specific sources when accuracy matters.
How does Simulation Of Marker Based Precision Landing Using Ros 2 Px4 Sitl And Gazebo connect to topic?
Simulation Of Marker Based Precision Landing Using Ros 2 Px4 Sitl And Gazebo can connect to topic when readers need context, examples, comparisons, or practical next steps inside the same topic area.
How does Simulation Of Marker Based Precision Landing Using Ros 2 Px4 Sitl And Gazebo connect to overview?
Simulation Of Marker Based Precision Landing Using Ros 2 Px4 Sitl And Gazebo can connect to overview when readers need context, examples, comparisons, or practical next steps inside the same topic area.