Search Snapshot: A single-link robot with a rotary joint is motionless at theta1 = 15 degrees. recently i made a 6-axis robot arm based on And did some changes, such ...
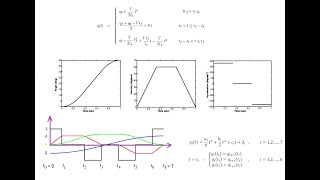
Trajectory Linear Function With Parabolic Blends - Resource Quick Tips
This context guide compares Trajectory Linear Function With Parabolic Blends through topic clusters, supporting snippets, intent signals, and verification reminders so the page can feel more natural across many search queries.
In addition, this page also connects Trajectory Linear Function With Parabolic Blends with for broader topic coverage.
Resource Quick Tips
recently i made a 6-axis robot arm based on And did some changes, such ... A single-link robot with a rotary joint is motionless at theta1 = 15 degrees.
Key Overview for Readers
A clean overview helps readers understand Trajectory Linear Function With Parabolic Blends before moving into details, examples, or connected topics.
General Checklist
This section highlights the practical pieces readers may want before opening a more specific related page.
General Situation Notes
Context matters because Trajectory Linear Function With Parabolic Blends can connect to nearby topics, related searches, and different reader intents.
Main details to review
- recently i made a 6-axis robot arm based on And did some changes, such ...
- A single-link robot with a rotary joint is motionless at theta1 = 15 degrees.
Why this topic is useful
Readers use this page when they need comparison ideas for Trajectory Linear Function With Parabolic Blends so they can continue with better search intent.
Reader Questions
How does Trajectory Linear Function With Parabolic Blends connect to similar topics?
Avoid treating one short snippet as complete, especially when the topic involves money, health, law, schedules, or current details.
Can details about Trajectory Linear Function With Parabolic Blends change?
Yes. Some details may change depending on providers, policies, dates, locations, product updates, or official announcements.
How can this page help with research?
It groups related context and search paths so readers can move from a broad idea into more focused follow-up pages.