Helpful Context Brief: This tutorial series was created for the IROS 2020 conference, which was a free to access On-Demand Conference. Different methods of generating parametric trajectories (joint variables as a function of time) for
Trajectory Planning In Robot - General Key Overview
This search guide collects Trajectory Planning In Robot with freshness checks, background notes, and nearby references while keeping the information easy to browse.
In addition, this page also connects Trajectory Planning In Robot with for broader topic coverage.
General Key Overview
Sebastian Castro discusses technical concepts, practical tips, and software examples for motion This tutorial series was created for the IROS 2020 conference, which was a free to access On-Demand Conference.
General Topic Connections
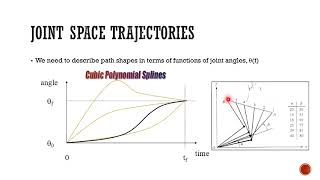
The translated content of this course is available in regional languages. Different methods of generating parametric trajectories (joint variables as a function of time) for
Useful Follow-Ups for Readers
Before relying on any single result, compare related pages and verify important facts from stronger sources.
Topic Details That Matter
Important details can vary by source, so this page groups the most readable points into a scannable format.
Key points worth scanning
- This tutorial series was created for the IROS 2020 conference, which was a free to access On-Demand Conference.
- Sebastian Castro discusses technical concepts, practical tips, and software examples for motion
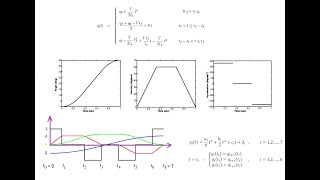
- Different methods of generating parametric trajectories (joint variables as a function of time) for
- The translated content of this course is available in regional languages.
Why this overview helps
A structured page helps by giving readers clearer context for Trajectory Planning In Robot before choosing what to open next.
Helpful Questions
How should beginners approach Trajectory Planning In Robot?
Beginners should scan the overview first, then use related terms to narrow the subject into a more specific question.
What questions should readers ask about Trajectory Planning In Robot?
Check freshness, source quality, related examples, and any requirements or limitations before relying on one answer.
What should be checked first?
Readers should check the main context, important requirements, source freshness, and any details that may change over time.